Cannot be tested on a simulated robot.
See also
NAOqi Audio
NAO - Technical overview | NAO H25 | NAO H21 | NAO T14 | NAO T2
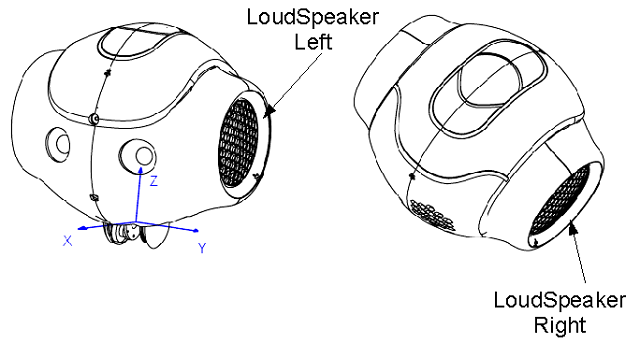
NAO is equipped with a stereo broadcast system made up of 2 loudspeakers in its ears.
Enter search terms or a module, class or function name.
 Cannot be tested on a simulated robot.
Cannot be tested on a simulated robot.